周博宇助理教授课题组6篇论文被机器人高水平会议期刊接收
近日,我院周博宇助理教授STAR(Smart Autonomous Robotics)课题组6篇文章被机器人领域高水平会议ICRA2024接收,其中3篇也同时发表于机器人高水平期刊RAL。
International Conference on Robotics and Automation (ICRA),由国际机器人与自动化学会(IEEE Robotics and Automation Society,简称RAS)主办,是机器人领域最负盛名的年度学术会议之一。自1984年首次举办以来,ICRA已经成为全球机器人研究者展示最新研究成果、交流学术思想的重要平台。IEEE Robotics and Automation Letters (RAL)也由RAS主办,自2016年创刊以来, 已经成为机器人领域最受欢迎的期刊之一。

以下为被接收论文的介绍:
01
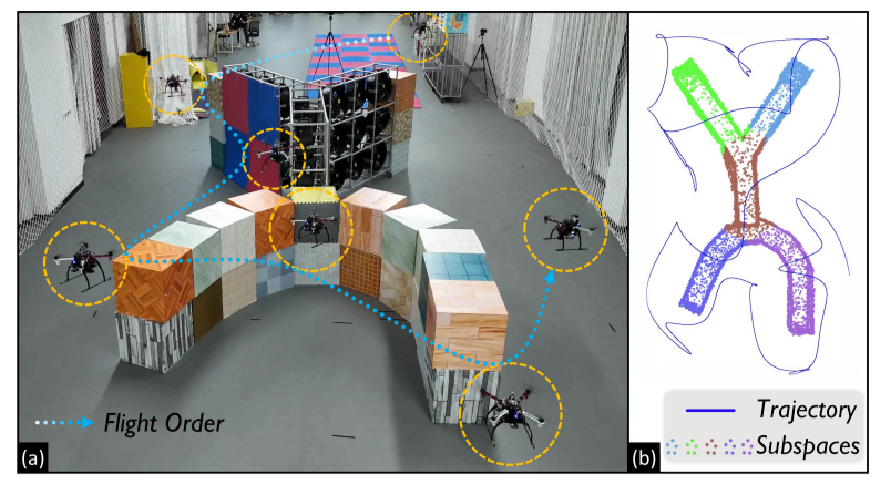
FC-Planner: A Skeleton-guided Planning Framework for Fast Aerial Coverage of Complex 3D Scenes
IEEE International Conference on Robotics and Automation (ICRA 2024)
针对UAV的3D覆盖路径规划关键而挑战重重,现方法在复杂场景下表现不佳。为此,我们提出FC-Planner,基于骨架引导,能快速实现高质量空中覆盖,无需预处理。通过SSD空间分解,结合全局和局部规划策略,确保路径高效质量。广泛测试显示,FC-Planner比现方法速度更快,路径更短,覆盖更全。
02
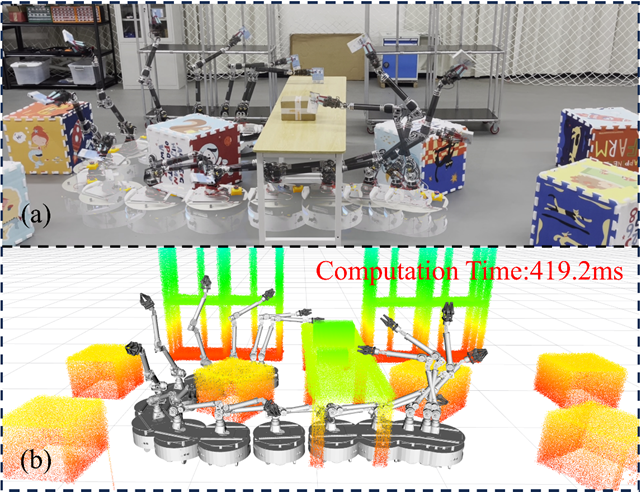
Real-time Whole-body Motion Planning for Mobile Manipulators Using Environment-adaptive Search and Spatial-temporal Optimization
IEEE International Conference on Robotics and Automation (ICRA 2024)
移动操作机器人具有广泛的应用前景,但实时全身运动规划仍然具有挑战性。为此,我们提出了一种实时运动规划方法,能够生成高质量、安全、灵活和可行的轨迹。通过环境自适应路径搜索和实时时空轨迹优化,我们的方法能够在具有挑战性的环境中快速生成全身轨迹。
03
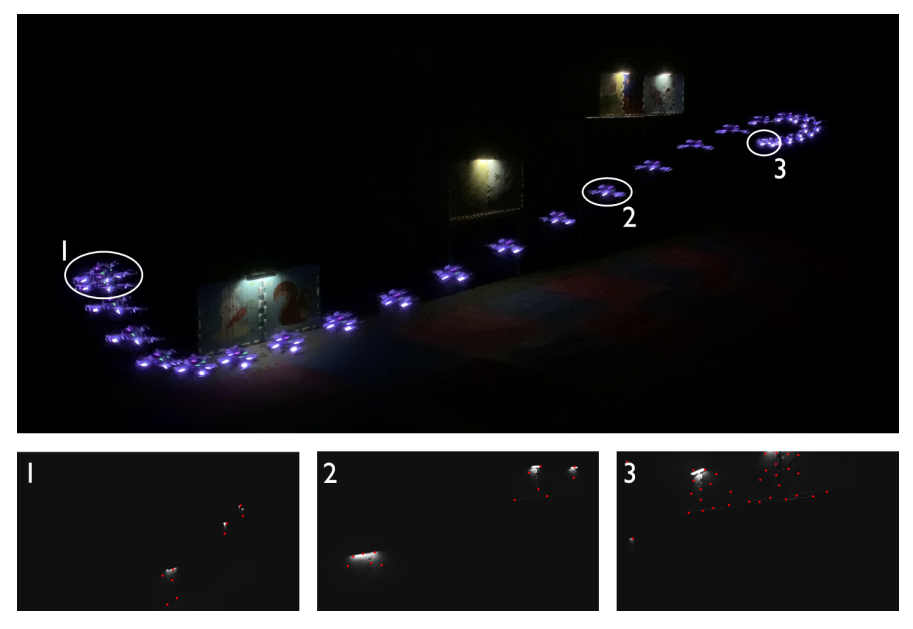
APACE: Agile and Perception-aware Trajectory Generation for Quadrotor Flights
IEEE International Conference on Robotics and Automation (ICRA 2024)
本文介绍了针对四旋翼机设计的APACE敏捷感知意识轨迹生成框架,关注特征匹配,提升了无人机状态估计的准确性。通过优化可见特征数量和视差角,生成符合安全、敏捷和动力学约束的轨迹。采用可微准确可见性模型,将规划问题分解为优化子问题。实验证实,该方法显著提高了状态估计准确性,均方根误差(RMSE)降低一个量级。
04
H2-Mapping: Real-time Dense Mapping Using Hierarchical Hybrid Representation
IEEE Robotics and Automation Letter (RA-L with ICRA 2024)
本文提出了基于NeRF的建图方法,利用神经辐射场技术,在边缘计算设备上实现更高质量的实时地图构建。采用分层混合表示,结合八叉树SDF先验和多分辨率哈希编码,描述场景几何,解决遗忘问题,提高建图质量。是首个在边缘计算设备上实现基于NeRF的高质量建图方法,优于现有方法。

05
MacFormer: Map-Agent Coupled Transformer for Real-time and Robust Trajectory Prediction
IEEE Robotics and Automation Letter (RA-L with ICRA 2024)
预测智能体行为是自动驾驶的关键任务,但现方法受地图利用和历史轨迹依赖限制。我们提出MacFormer框架,通过耦合地图和参考提取器,采用多任务优化策略增强网络学习,设计双向查询方案提升效率。在真实基准测试中,我们的方法达到最先进性能,对不完整轨迹输入具有鲁棒性。同时,与经典模型结合的改进验证了框架的多功能性。

06
AutoTrans: A Complete Planning and Control Framework for Autonomous UAV Payload Transportation
IEEE Robotics and Automation Letter (RA-L with ICRA 2024)
机器人社区对自主空中运输兴趣高涨。尽管无人机吊运系统机械结构简单,但规划与控制算法挑战重重。我们提出了系统性解决方案,采用实时规划和自适应NMPC,考虑系统动态变化和非线性动力学,生成平滑轨迹确保安全和动力学可行性。实验证明,即使在受限空间,我们方法能生成高质量轨迹,准确跟踪飞行轨迹,应对外部不确定性。

更详细的论文信息和相关视频可访问STAR主页




