智飞虚实融合训练场
平台概述
智飞虚实融合训练场是集风墙、动捕系统和虚实融合演示系统于一体的综合性科研平台,总面积556m2,位于中山大学珠海校区瀚林2号A105。可开展多场景风场测试、高精度运动捕捉相关科研试验,也能实现物理与虚拟场景的无缝融合,为相关领域研究提供专业的一体化验证与研发平台。
训练场内设备面向校内外开放共享。
一、Windshaper风墙系统
1. 系统概况
Windshaper风墙是由瑞士Windshape SA研发的高度模块化、智能化室内风洞测试系统,用于飞行器(如无人机)等在实验室环境中的风场测试。训练场包含1个立式风墙、1个角度可调(0∘-90∘)的倾斜风墙和1个稳流器。

立式风墙

倾斜风墙

稳流器
2. 核心特点
(1)模块化结构:由可堆叠的模组组成。单面风墙由12×8个模组构成,每个模组含9个网格风扇单元,每个单元配备2个反向旋转风扇,最高风速达16米/秒。数百个独立控制的风扇单元可实现气流的精准控制。
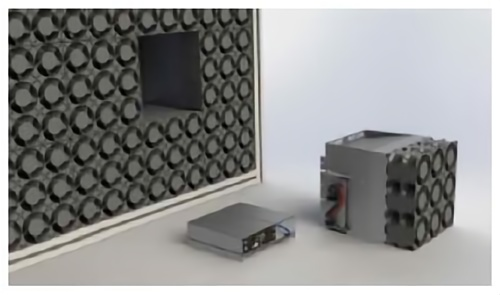
风扇模组
(2)动态风廓线生成能力:通过三维输入u = ƒ(x, y, t),创造动态的、特定的风况环境。
(3)灵活的控制方式:用户可通过WindControl软件或Python 3.x API 编写脚本直接控制。
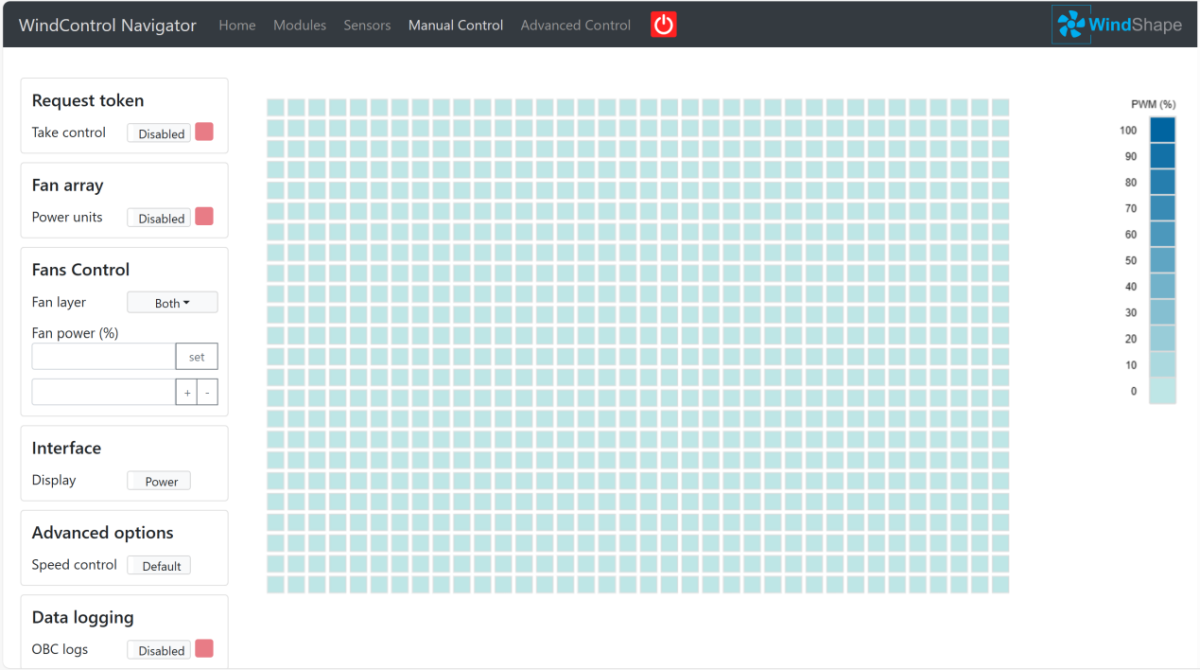
WindControl软件界面
3. 可模拟的风况类型
Windshaper能够模拟多种真实世界中的复杂风况:
(1)均匀层流:模拟无人机在静止空气中以恒定速度飞行的场景,用于测试起飞风速基准。
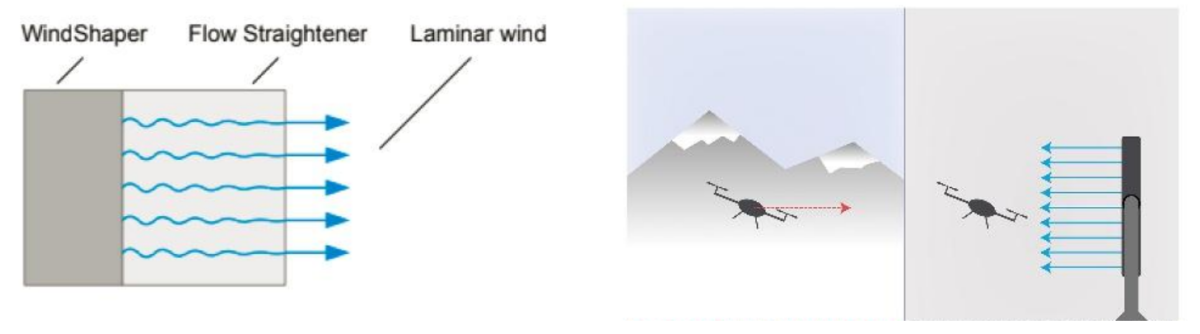
均匀层流示意图 无人机在均匀层流飞行
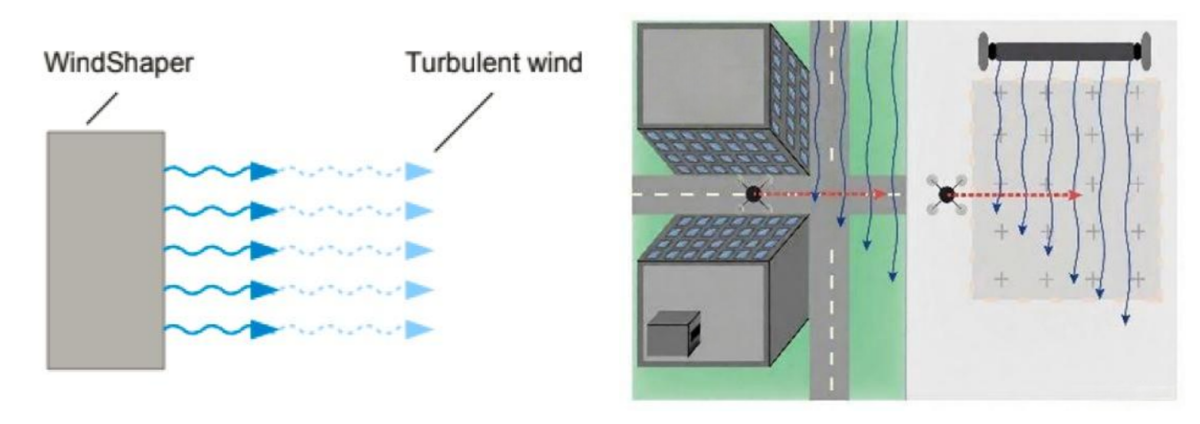
(2)湍流:模拟天气、地形等因素导致的湍流,可控制不同区域的湍流水平。
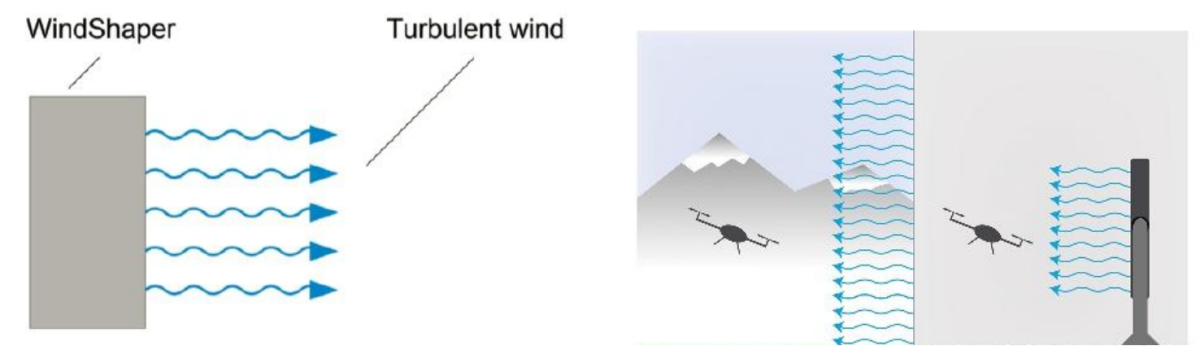
湍流示意图 无人机在湍流中飞行
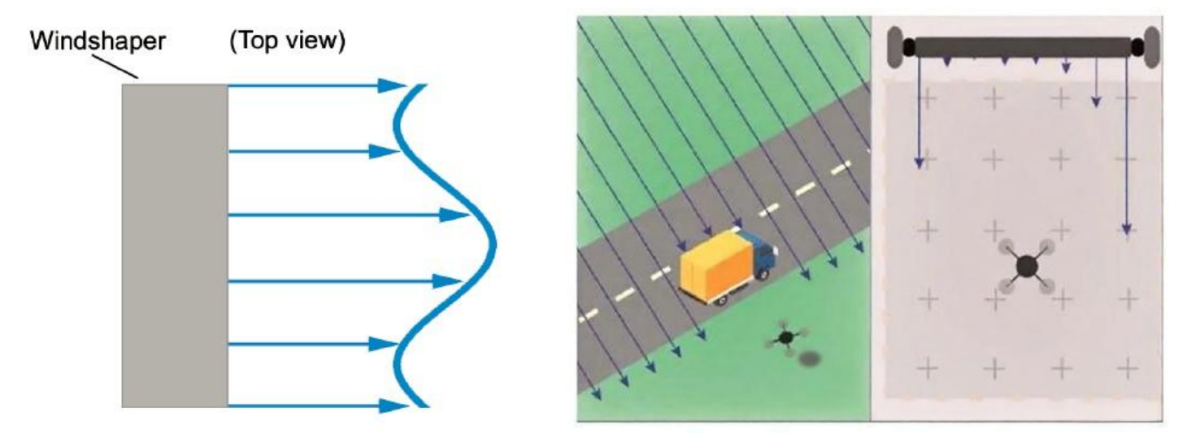
(3)风切变:模拟相邻气流层速度不同的平行流动,常用于模拟建筑物、地形周围的不稳定气流。
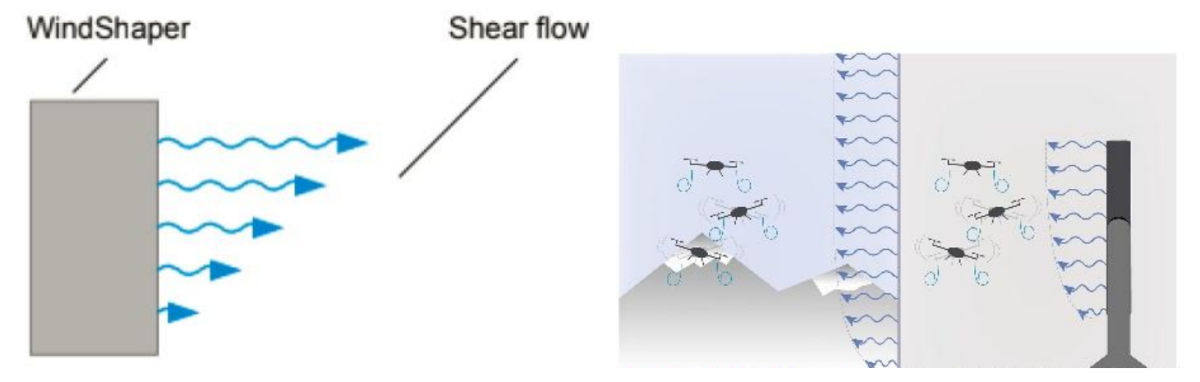
风切变示意图 无人机在风切变流场飞行
(4)时变风:可编程控制风扇风速随时间变化,生成如正弦波等任意变化曲线的风廓线。
时变风示意图 无人机在时变风中飞
(5)阵风:通过急剧的风速变化模拟阵风条件,考验无人机导航和抗偏移能力。
阵风示意图 无人机在阵风中飞行
(6)垂直风:通过将风墙水平放置,模拟无人机着陆时由自身下降气流引发的湍流环境。
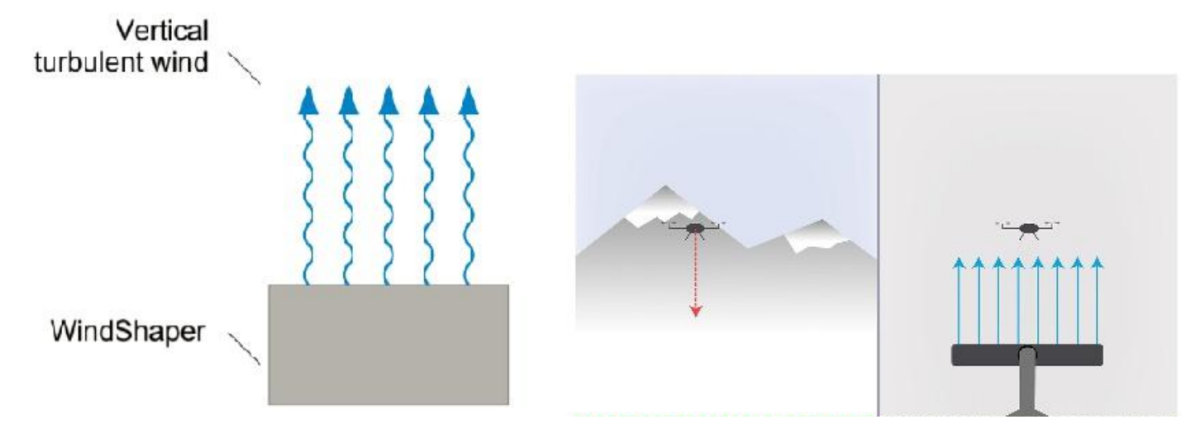
垂直风示意图 无人机在垂直风中飞行
4. 可定制功能
滤风装置:可选配稳流器减少不需要的湍流,确保气流均匀,用于研究地面效应和多旋翼无人机着陆阶段的湍流效应。
倾斜装置:最高倾斜至90°,可模拟无人机的整个起降过程。
5. 应用场景
该系统广泛应用于无人机及飞行器的研发与验证:
自由飞行测试与着陆阶段优化
确定湍流极限与固定翼外形设计优化
研究不同风廓线下的飞行器性能
垂直起降(VTOL)及过渡阶段测试
二、动捕系统
1.系统概况
训练场部署74台OptiTrack PrimeX22运动捕捉摄像机,构建覆盖556m2的动作捕捉空间,实现“高精度、大空间、低延迟”的动捕能力,支持复杂场景下的实时三维运动追踪。

人体运动数据采集
2. 核心优势
(1)超大捕捉空间与精度
PrimeX22具有79°超宽视场角,结合74台设备阵列布局,实现556m2全域覆盖。3D定位误差小于0.15mm,旋转误差小于0.5°。
(2)高速与低延迟采集
支持210 FPS全局快门采集,可捕捉超30m/s的快速动作,同步延迟低至微秒级。
(3)抗干扰与环境适应性
每台摄像机集成20颗850nm红外LED及带通滤光片,有效过滤环境光干扰;系统具备自动连续校准功能,无需手动干预。
3. 应用场景
该系统可广泛应用于:
智能体位姿追踪
影视动画制作
虚拟现实仿真
生物力学研究
三、虚实融合演示系统
1.系统概况
该系统是为大规模集群无人系统打造的综合性交互演示环境,依托AR/VR/MR技术,通过多通道投影与空间定位跟踪技术,实现真实物理系统与虚拟场景的无缝叠加,解决“纯数字仿真不真实,纯物理试验不现实”的瓶颈问题。
系统两大投影核心:弧形融合投影系统采用2台工业级激光投影仪搭配定制弧形幕,通过多通道融合技术实现画面无缝拼接;沉浸式地面交互投影系统采用6台工业级激光投影仪构建地面投影子系统,结合4个激光雷达进行实时动作捕捉,实现地面画面的互动响应。

城市街区场景

丛林场景
2. 核心优势
(1)突破验证瓶颈
通过“虚实结合”技术实现真实物理系统与高逼真虚拟场景的无缝叠加,为大规模集群无人系统算法验证提供灵活可靠的解决方案。
(2)提供一体化验证平台
超大投影幕结合Unity 3D/UE4等引擎,为机器视觉等研究提供低成本、高质量、可重复、多场景的图源信息和评估环境。
(3)实现精准动态交互
互动雷达可实时将人员或机器人的物理移动转换为坐标数据,触发虚拟内容响应。
(4)动捕解锁三维交互
集成动捕系统后,平台从2D位置感知升级为3D空间全姿态、高精度、低延迟的动作捕捉与映射,提升逼真度与沉浸感,赋能“虚实共生”。
3. 应用场景
该系统可广泛应用于:
集群智能算法验证与优化
人机协同操作与交互研究
沉浸式虚拟训练与模拟演练
AR/VR/MR内容开发


